Microrobots for targeted drug delivery
Fabricated with a gel side for carrying drugs and a magnetic side for steering, these microrobots can navigate complex biological environments like intestines.
Fabricated with a gel side for carrying drugs and a magnetic side for steering, these microrobots can navigate complex biological environments like intestines.
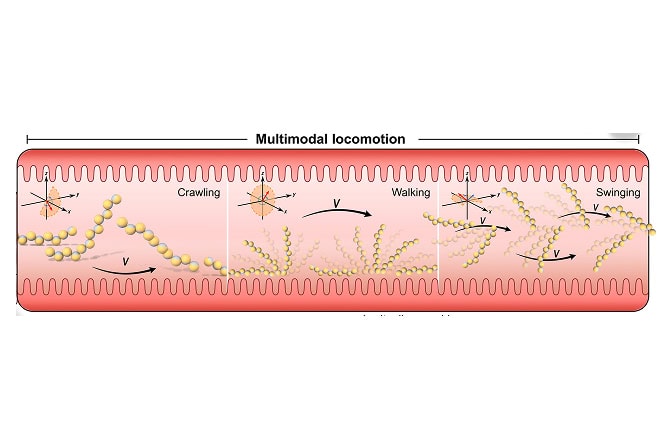
On screen text: Introducing microbots for precise drug delivery. Magnets direct them to walk… crawl… and swing. Each particle has a magnetic side and a gel side that carries a drug. In a 3D printed knee, microrobots showed they can come together, travel to a target site, and deliver the drug by dissolving the gel. The magnetic particles travel back to the entry point. Then, they are retrieved with a magnet.
The team also tested a minimally invasive surgery use case with a model of a human knee. The microrobots were released at an easily accessible area, then maneuvered to a difficult-to-reach target site to dispense a dye before navigating back to the entry site for extraction.
“With this work, we’re moving closer towards very advanced therapeutic delivery. Our advanced fabrication techniques enable the creation of soft robotic systems with remarkable features and motion capabilities,” said Molly Stevens, the John Black Professor of Bionanoscience at the University of Oxford Institute of Biomedical Engineering and co-senior author of the study.
The particles that compose the microrobots are made by pushing a stream of gel containing magnetic particles through a narrow channel. A stream of oil enters the device and intersects the gel, pinching off evenly sized droplets. Magnetic gel particles sink to the bottom of the droplet and empty gel floats on the top.
The resulting devices, called permanent magnetic droplet-derived microrobots or PMDMs, measure about 0.2 millimeters, or the width of two human hairs.
“Traditional microrobot fabrication has very low throughput. Using microfluidics, we can generate hundreds of microrobots within minutes. It significantly increases efficiency and decreases fabrication cost,” said Yuanxiong Cao, a doctoral student in the Stevens Group at the University of Oxford and co-lead author of the study.
Simulations predicted and then fine-tuned how the microrobots move in response to specific magnetic field frequencies. Simulated obstacle courses served as a proving ground for steering the microrobots through complex environments.

Explore the forefront of digital engineering
at Michigan Engineering
The physical system uses an electromagnet controlled by commercial software, creating magnetic fields that form and move inch-worm-like chains of microrobots. The chains move in three different ways, which the researchers refer to as walking, crawling or swinging. They can disassemble and reassemble on command, helping them traverse narrow passages or other obstructions.
“I was amazed to see how much control we have over the different particles, especially for the assembly and disassembly cycles, based on the magnetic field frequency,” said Philipp Schönhöfer, a co-lead author of the study and research investigator of chemical engineering at U-M in the group of Sharon Glotzer, the Anthony C. Lembke Department Chair of Chemical Engineering and co-senior author.
As a next step, the research team is designing new microrobots that can better navigate intricate environments. They will test different particles in emulsions to understand how they attract each other and study how larger particle swarms behave under varying magnetic fields.
“With our computational platform, we have now also developed a playground to explore an even wider design space, which has already triggered ideas for more complex microrobot architectures inspired by the PMDM concept,” Schönhöfer said.
Researchers from the Imperial College of London also contributed to the study.
Individual researchers were funded by the University of Oxford, China Scholarship Council, Engineering and Physical Sciences Research Council, Rosetrees Trust, British Heart Foundation, U.K. Research and Innovation, U.K. Department of Science Innovation and Technology, Royal Academy of Engineering and U.S. National Science Foundation.
Computations were supported by Anvil at Purdue University and Advanced Research Computing at the University of Michigan.