Simulated humanoid robots learn to hike rugged terrain autonomously
Now able to learn locomotion and navigation together, robots develop balanced gaits and safe routes.
Now able to learn locomotion and navigation together, robots develop balanced gaits and safe routes.
Experts
Research Fellow in Computer Science and Engineering
Training humanoid robots to hike could accelerate development of embodied AI for tasks like autonomous search and rescue, ecological monitoring in unexplored places and more, say University of Michigan researchers who developed an AI model that equips humanoids to hit the trails.
With their new AI framework called LEGO-H, the researchers trained simulated, camera-equipped Unitree Robotics humanoids to plan ahead, avoid obstacles, maintain posture and adjust speed and stride to uneven ground. This research was federally funded by the National Science Foundation.
“Our model is the first that could give a humanoid robot the ability to see, decide and move entirely on its own—not just walking, but hopping, stepping or jumping as the trail demands. Until now, humanoids have mostly been ‘blind,’ dependent on human operators for every movement decision,” said Stella Yu, a professor of computer science and engineering and senior author of a study presented at the IEEE Conference on Computer Vision and Pattern Recognition in Nashville in June 2025.
Text on screen:
Traditionally, robots have learned to navigate on flat, unobstructed surfaces using pre-built maps and constant human guidance, with high-level planning (“where to go”) and low-level execution (“how to move”) treated as separate problems.
“Unifying navigation and locomotion in a single policy learning framework lets the robots develop their own movement strategies based on the situation without any human pre-programming patterns,” said Kwan-Yee Lin, a research fellow in computer science and engineering and lead author of the study.
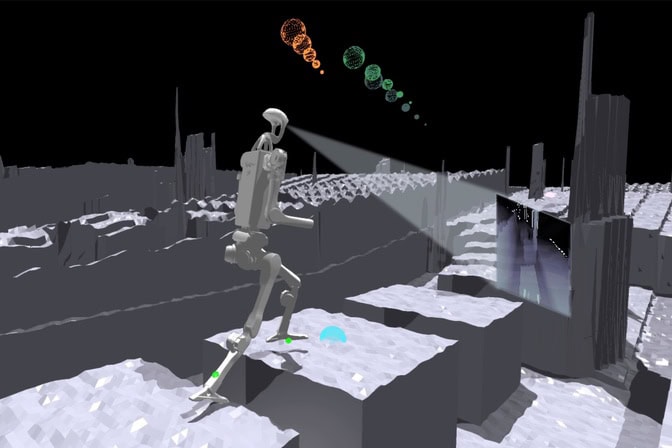
In the simulation, humanoid robots are dropped in an unfamiliar trail and asked to navigate to a specific point. They are equipped with visual input, body awareness and a simple GPS direction—such as “the destination is 0.3 miles northeast”—rather than turn-by-turn directions.
The virtual 6-foot adult-sized and roughly 4-foot kid-sized robots hiked trails of five different types, each with five difficulty levels. Performance was measured on completeness, safeness and efficiency.
When compared to robots given perfect navigation and environmental information in advance, the simulated autonomous robots’ performance was comparable or better in efficiency and safety. Their built-in body awareness helped prevent damage, and removing that aspect noticeably reduced hiking success, the researchers said.
Virtual autonomous robots learned to adapt their body position and motion style based on the terrain. For example, when coming to a tight space, the robots learned to lean sideways to squeeze through. They were also able to decide paths based on obstacles—walking around tall obstacles and stepping over lower obstacles, going around if they were unable to step over.
“Amazingly, the virtual robots could regain their balance after a stumble—something not seen in previous humanoids. We didn’t program this. It emerged naturally as the robots learned to interact with their environment,” said Lin.
For this first study, the robot’s upper body was kept fixed because adding upper body movements dramatically increases modeling complexity. Now that this proof-of-concept study worked for leg movement, the research team is working towards full-body coordinated hiking to utilize the robot’s full degrees of freedom to maximize stability, safety and efficiency in locomotion.
The research team is actively working on adapting these policies to physical humanoids in the real world.
This project was funded in part by the National Science Foundation (2215542 and 2313151).
